← Back to Projects
Matt Haywood
Drone Project
Drone Building
I decided to build a custom quadcopter after becoming fascinated with them after watching many videos online. I ordered the parts online and followed videos on how to assemble the drone. I soldered the motors to the ESC's and the ESC's to flight controller. I then mounted the electronics to the built up frame. After assembling the drone I then set the flight controller with the different PID settings and tested it to see how I could make it fly better.
After this I wanted to make it fly faster and fly missions on its own. I also saw the latest drones that were being used for drone racing and decided to build a small racing drone of my own. This small, lighter drone was much faster, more compact and could easily do acrobatics. I upgraded the flight controller of the original drone to an arducopter flight controller which allows for the addition of a GPS/Compass module. This meants it can fly missions autonomously and perform auto takeoff/landing.
Race Drone
06/2016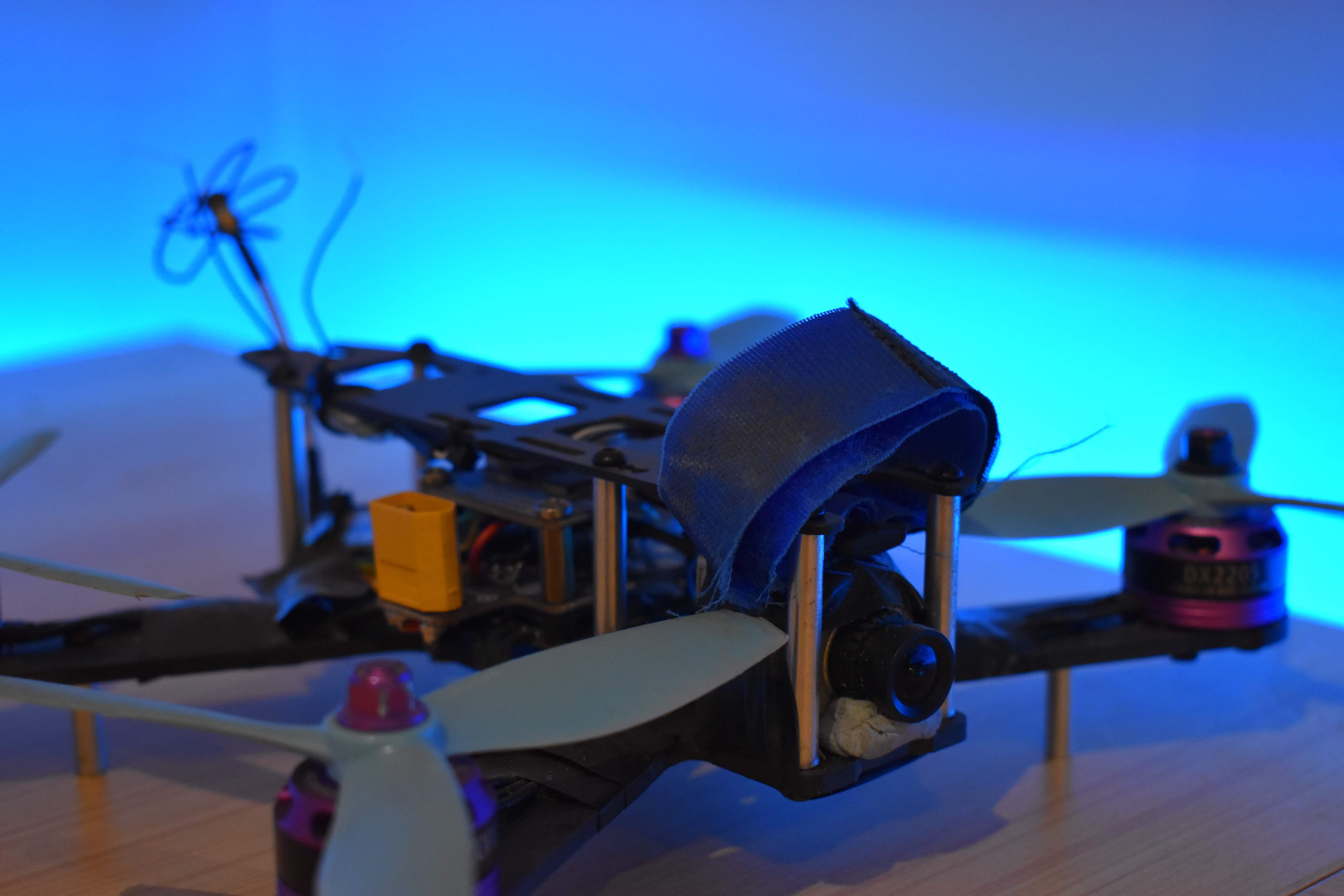
The race drone was built using following components ordered online:
- 4x ESC's
- 4x Crazepony Motors
- 1 Battery
- Power Distribution Board
- F3 Flight controller
- FPV Camera
- Fat Shark FPV Transmitter
450 Drone
2014Drone Flying

This photo was taken with a DJI Mavic Pro.